Physical Therapy, Rose Mary M. Scully, Marylou R. Barnes
JB.Lippincot Company, Philadelphia. 1089.
Oleh : Roes.DS.
Berjalan adalah suatu hal yang menjadi perhatian besar dan harapan dari pasien2 kita. Sebagai fisioterapis, kita berkewajiban dan selalu berupaya untuk mampu melakukan assessment pola jalan pasien dengan tujuan akhir untuk bisa mewujudkan harapan mereka, mengembangkan potensi mobilitas tertinggi mereka. Untuk itu pada kesempatan kali ini marilah kita bersama sama menengok lagi, menyegarkan memory kita akan pola jalan yang normal, skill ketrampilan kita dalam melakukan observasi dan menganalisa pola jalan. Tentu saja pemahaman tentang pola jalan yang normal beserta parameter2 yang lazim dipakai, pathomekanikal ( pathological gait ) akan sangat diperlukan. Semua pengetahuan dan ketrampilan tsb akan sangat bermanfaat saat kita terapkan diklinik FT, sehingga bila ada dysfunction tidak akan terlewatkan begitu saja.
Semoga methode ini bisa kita terapkan untuk mengatasi segala sesuatu yang berkaitan dengan dysfunction gerak yang pada akhirnya akan menimbulkan gait dysfunction. Methode ini bisa kita terapkan pada kondisi2, misalnya; Amputasi, Arthritis, Hemiplegie, Ankle sprain, Multiple Sclerosis, Gangguan Musculosceletal serta kondisi2 Neurologis.
Pasien2 dengan deficit neuromusculair, musculosceletal, cognitive seringkali menampakan gejala menurunnya kapasitas fisik & kemampuan fungsionalnya. Dimana selanjutnya akan menurun pula kemampuan mobilitas/ambulatory, penurunan ini nanti akan nampak pada penurunan nilai yang kita pakai sebagai acuan penilaian ( parameter ).
Keberhasilan suatu upaya rehabilitasi tergantung pada kemampuan, ketrampilan kita dalam melakukan evaluasi, menginterpretasikan data yang terkumpul. Terapi / intervensi ditetapkan berdasarkan temuan2 dalam assessment ( identifikasi problema / diagnosis FT), dengan tujuan untuk mengatasi masalah dan atau meminimalkannya.
Istilah2, Parameter yang dipakai :
Definisi Berjalan :
Berjalan adalah berpindahnya tubuh dari satu titik, ketitik berikutnya dengan cara menggunakan kedua tungkai (bipedal : posisi tubuh selalu tegak selama proses berlangsung). Pola repetisi daripada penumpuan berat badan dari satu tungkai ketungkai yang lain dengan heel – toe striding adalah fenomena yang membedakan manusia dengan hominids yang lebih primitif ( Napier, 1967).
Cycle berjalan :
Satu cycle, dimulai dari heel strike, sampai tungkai yang sama mulai heel strike berikutnya.
Interval antara dua steps bisa dihitung jarak dan waktunya.
Stride legth :
Adalah jarak antara dua jejak kaki, pada kaki yang sama. Pada orang dewasa pria jaraknya antara 140 – 156,5cm.
Stride duration :
Adalah waktu yang dibutuhkan untuk jarak tersebut.
Step length :
Adalah jarak antara dua jejak kaki , baik dari kanan ke kiri atau sebaliknya. Jarak rata2nya adalah 68 – 78cm.
Step duration :
Adalah waktu yang dibutuhkan dari heel strike kaki yang satu ke heel strike kaki yang lain.
Cadence :
Adalah jumlah steps permenit, dimana nilai rata2nya adalah 112 – 116 permenit.
Parameter tersebut diatas bisa kita pergunakan sebagai tolok ukur yang valid dan obyektif dalam rangka assessment, analisa pola jalan pasien.
Gait analisis memerlukan pendekatan yang akurat dan tersistem, pada phase stance maupun swing. Pemahaman tentang gerakan2 yang terjadi pada persendiannya serta ROM yang dibutuhkan untuk mencapai pola jalan normal juga diassessment. Misalnya, ditungkai, pelvis dan trunk.
Komponent Gait Normal :
Seperti telah dibahas, bahwa berjalan membutuhkan alternating support dari satu tungkai ketungkai yang lain. Gerakan reciprocal ini dibutuhkan untuk menerima, menyerap berat tubuh dan torque yang menyertainya, sehingga proses berjalan akan berlangsung secara mulus (smooth), mengalir seperti cairan tanpa ada interupsi dalam proses pemindahan berat tubuh kedepan. Untuk mencapai pola jalan normal tergantung pada 3 kemampuan / task fungsional, yaitu : 1). Weight Acceptance. 2). Single limb Support. 3). Limb Advancement.
Ketiga fungsi tsb berlansung pada bidang sagital ditinjau dari persendian yang bergerak, yaitu : hip, knee, ankle baik pada phase atau sub phase swing maupun stance

Stance.
Initial Contact.
Initial contact periodenya sangat singkat. Otot2 tibialis anterior dan extensor jari2 mempertahankan ankle dalam posisi netral selama perode initial contact ini. Hal ini dalam rangka persiapan ankle masuk keposisi untuk melakukan apa yang dikenal sebagai heel rocker, yang terjadi pada loading response.

Loading Response (LR).
Pada saat loading response, aktifitas otot pada semua segment beraksi melawan kecenderungan gerakan flexi yang timbul pada saat menerima beban berat badan (terjadi di posterior ankle joint). Kontraksi eccentris drpd otot2 anterior ankle meresponse plantar flexion torque, yang akan membenturkan kaki kelantai (foot flap).
P3 FT di Fasilitas Pelayanan Kesehatan 4
Aksi heel rocker ditimbulkan oleh otot2 bagian anterior, menarik tibia. Sehingga muncul momentum kedepan dan memflexikan lututnya.
Lutut flexi 15° dengan kontrol oleh Quadriceps yang berkontraksi secara eccentris untuk melawan kecenderungan flexion torque akibat dari heel rocker dan posisi tubuh yang relatif berada disebelah posterior kaki.
Dengan kontrol plantar flexion dan knee flexion tadi maka weight acceptance diabsorbsi, stabilitas tungkai tercapai dengan mantap sambil mempertahankan momentum kedepan.
Hip tetap dalam posisi flexi 30° dan pelvis forward rotasi 5°. Rapid, high-intensity flexion torque, adalah torque kedua terbesar yang timbul dalam berjalan, torque ini dilawan oleh gluteus maximus, hamstrings, adductors magnus dan gracillis yang berkontraksi secara eccentris. Pelvis distabilisasi pada bidang frontal oleh kerja otot gluteus medius, minimus dan tensor fascia lata. Dengan kerja otot ini maka kecenderungan terjadinya trunk flexi dicegah
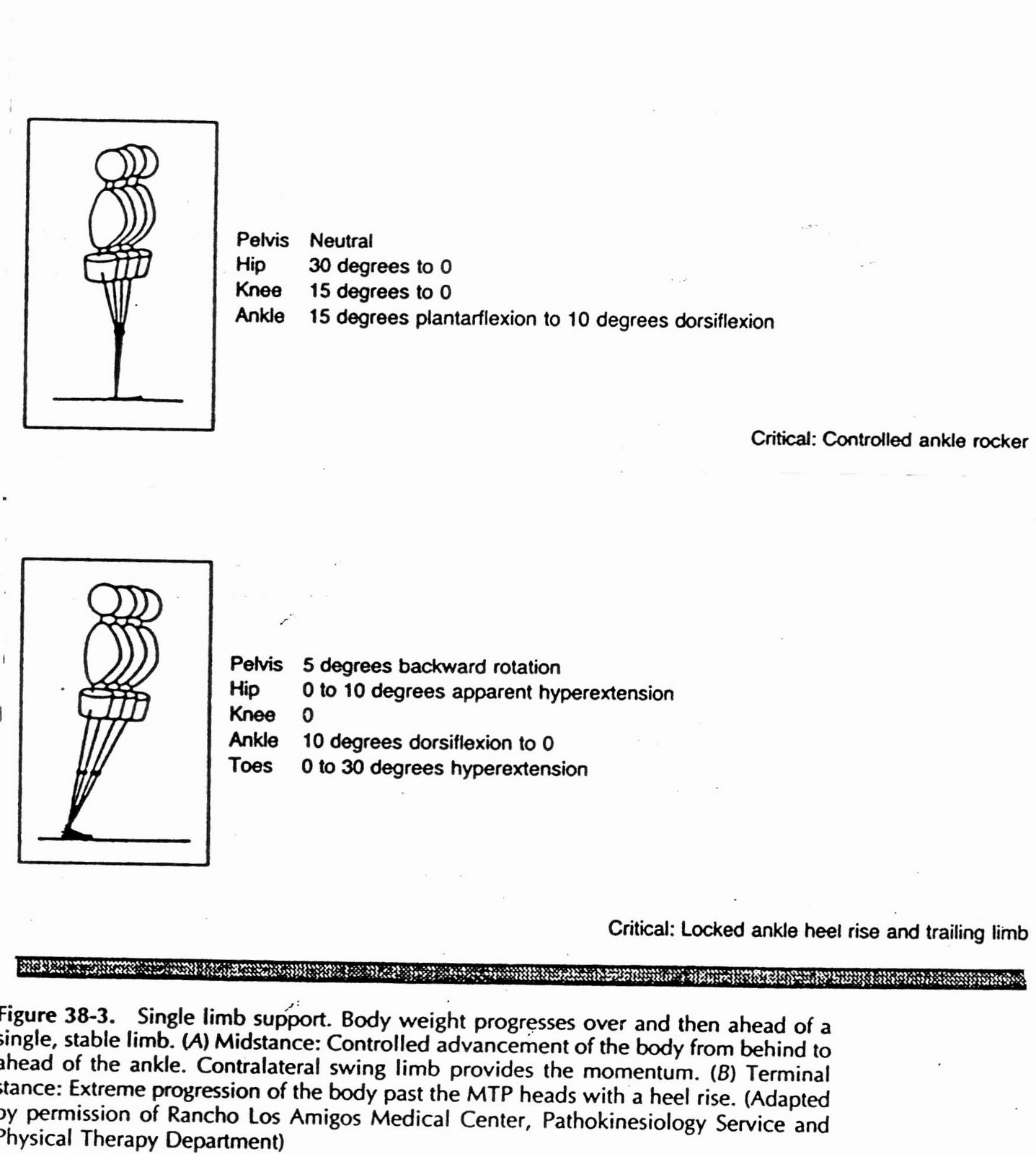
Mid Stance (MSt).
Selama midstance ankle perlahan bergerak kearah 10° dalam usaha meningkatkan torque dorsi flexi. Soleus dan gastrocnemius berkontraksi secara eccentris untuk menstabilkan tibia. Tubuh berayun diatas kaki yang stabil tadi dan menkontrol tibia sehingga lutut bergerak kearah extensi. Kejadian inilah yang dikenal sebagai ankle rocker.
Hip extensi bergerak ke posisi netral dengan pelvis rotasi yang ditimbulkan oleh momentum swing drpd tungkai sisi contralateral. Konswekwensi dari peristiwa ini adalah bahwa sebenarnya stabilitas pada stance phase tidak membutuhkan kerja otot2 hip. Selanjutnya pelvis pada bidang frontal distabilisasi oleh grup abductor, yang mencegah pelvis drop disisi contralateral.
Terminal Stance (TSt).
Pada terminal stance, ankle terkunci pada posisi netral→dorsiflexi kecil, metarso phalangeal joint extensi 30°. Dorsi flexion torque mencapai puncaknya. Calf muscle tetap aktif untuk mencegah tibia colapse dan membiarkan tumit terangkat sementara berat tubuh berayun kedepan diatas kaki. Forefoot rocker meningkatkan kemaximum forward progression untuk step length. Ada tiga hal kritis yang memungkinkan terjadinya forefoot rocker yaitu : Locked ankle, heel rise dan progression diatas kaki, semua hal tsb terjadi pada periode single limb support. Secara universal terminal stance dikenal dengan istilah push off. (istilah ini kurang akurat bila diterapkan pada pasien dengan amputasi below knee dengan prosthesis).
Lutut tetap extensi saat extensi torque mulai berkurang pada akhir drpd subphase ini. Stabilitas tanpa memerlukan kerja otot.
Hip tetap extensi→ netral posisi, 10° hyperextensi. Posisi ini disebabkan oleh backward rotation pelvis 5° dan oleh extensi di lumbar spine.
Pre-swing (PSw).
Walaupun subphase pre-swing adalah periode dimana masih ada double support, tetapi dimasukan dalam kelompok swing, sebab pada phase ini gerakan yang terjadi dilutut sebenarnya adalah gerakan persiapan untuk mengayun tungkai kedepan dan mempersiapkan kaki bebas dari lantai untuk masuk subphase initial swing. Selama pre swing berlangsung, ankle dalam posisi 20° plantar flexi, metetarso phalangeal joint
P3 FT di Fasilitas Pelayanan Kesehatan 5
extensi sampai 60°. Selama periode double support berlangsung, kaki memberikan bantuan balance dan relatif tidak dibutuhkan aktifitas otot. Torque dorsiflexi timbul.
Lutut flexi 30°, secara pasif, walaupun demikian gracillis mulai aktif. Torque flexi terjadi sebagai akibat dari penumpuan tungkai contralateral serta oleh berayunnya tubuh kedepan melewati jari2. Pada saat inilah flexi knee bertambah.
Hip tetap netral→extension dan pelvis backward rotasi. Kedua posisi tersebut dicapai secara pasif. M.Illiacus dan M.Rectus femoris aktif. Torque extensi berkurang sampai nol. Tungkai bersiap untuk diayunkan.
Initial Swing (Isw)
Ankle bergerak ke 10° plantar flexion, otot bagian anterior ankle mempersiapkan kaki bebas dari lantai dan masuk subphase initial swing.
Lutut flexi sampai 60° dan kaki bebas dari lantai. Selama periode ini sering terjadi toe drag, karena tidak adequatnya flexi lutut dan dorsiflexi ankle.
Kontribusi dari m.iiliacus, adductor longus, gracilis dan sartorius membawa hip ke 20° flexi dan pelvis mulai forward rotasi. Pelvis dan hip bergerak secara harmonis, terjadi forward rotasi pelvis saat hip flexi. Sedangkan rotasi backward pelvis berkaitan dengan hip extensi.
Midswing (MSw)
Ankle dalam posisi netral, otot bagian anterior ankle aktif, ini adalah gerakan yang membebaskan kaki dari lantai. Tibia mencapai posisi tegak lurus terhadap lantai saat lutut mencapai 60° flexi. Biceps femoris tetap aktif mengkontrol dengan eccentris kontraksi, walaupun momentum gerakan (primer) berlangsung secara pasif.
Di hip gracilis tetap aktif untuk membantu menambah hip flexi sampai 30°, juga menambah momentum kepada tungkai yang berayun kedepan. Sedangkan sartorius, adductor longus dan iliacus menjadi tidak aktif.
Terminal Swing (TSw)
Otot2 sebelah anterior ankle tetap aktif untuk mempertahankan ankle dalam posisi netral selama subphase terminal swing. Ini dalam rangka menjamin posisi ankle dalam posisi yang tepat saat heel contact di phase weight acceptance pada subphase initial contact berikutnya.
Aktifitas quadriceps secara concentris menjamin knee extension sampai posisi lutut netral, sedang kontrol gerakan dilakukan oleh hamstrings.
Hip tetap dalam posisi 30° flexi dan terjadi 5° forward rotasi pelvis. Otot yang tetap aktif adalah m.gracillis sebagai flexor hip. Kombinasi gerakan hip flexi, pelvis rotasi dan knee extensi berkontribusi pada step length
Trunk Aktivity.
Trunk tetap netral dan tegak dalam melalui semua phase gait. Trunk yang tegak mengkonservasi energy dengan balancing berat tubuh diatas basis support.Otot2 extensor trunk kontralateral berkontraksi secara eccentris untuk mempertahankan trunk tetap tegak dibidang sagital dan frontal selama proses weight acceptance. Perpindahan berat tubuh kebawah pada initial kontak bertemu dengan kekuatan keatas pada saat tumit menyentuh lantai. Kekuatan/force ini ditranfers ke pelvis dan trunk sehingga menimbulkan kecenderungan gerak flexi trunk karena posisi trunk relatif lebih keanterior.
Pathological Gait.
Motor dysfungsi sebagai akibat dari impairment dari system2 neuromusculair, musculosceletal serta fisiologis support dari fungsi tubuh akan berwujud dalam bentuk menurunnya efisiensi gerakan, berkurangnya potensi mekanikal, serta inadequate energy untuk bergerak. Ketika pasien mempunyai inkoordinasi dalam kerja otot, inadequate kekuatan otot, keterbatasan ROM, keseimbangan yang jelek, ketidak akuratan sensory integrasi serta ada nyeri maka bisa diharapkan akan muncul gejala defisiency dalam gait/berjalan. Luas dan type ketidaknormalan gait ditentukan oleh, penyebabnya, seberapa banyak system yang terganggu.
Ada lima kelompok besar sebagai penyebab pathological gait. Lima hal tsb adalah :
1). Nyeri. 2). Kelemahan. 3). Deformitas. 4). Sensory disturbance. 5) Gangguan kerja otot yang berkaitan dengan gangguan / deficit fungsi CNS seperti pada peningkatan kerja otot dan dyskinesia.
Pain :
Nyeri bisa bersifat akut maupun kronik. Dengan adanya nyeri maka fungsi gerakan akan terganggu. Pasien akan berusaha menghindari aktifitas2 atau gerakan2 yang memperberat nyerinya. Akibatnya terjadi penurunan mobilitas atau persendian tertahan dalam satu posisi tertentu, sehingga malahan akan memperparah nyeri dan dysfungsinya. Dalam observasi akan nampak phase stance tidak equal antara tungkai yang satu dengan yang lain. Pasien akan mengkompensasi dengan bertumpu pada tungkai yang sehat sehingga tekanan / kompresi terhadap persendian berkurang dengan harapan nyerinya berkurang juga, pada perode weight bearing. Kompensasi / upaya lain adalah dengan memperkecil arcus gerakan tungkai atau dengan menurunkan kecepatan gerakan tungkai pada phase swing. Bila nyeri dengan berbagai penyebab berlansung saat berjalan maka dalam observasi akan kita temukan ; menurunnya stride length, cadence, velocity serta unloding dini.
Weakness.
Kelumpuhan akibat dari kerusakan musculotendineous atau kerusakan pada Anterior Horn Cell, myo-neural junction, serabut otot akan sangat besar pengaruhnya terhadap kemampuan berjalan. Meskipun demikian pasien dengan kelemahan otot yang luas masih mungkin bisa berjalan asalkan sensory masih berfungsi, sensory integration dan central motor control normal, serta tidak ada deformitas yang parah. Bila ada kelemahan otot maka akan nampak pada fungsi kontraksi eccentris atau restraining akan menurun, demikian juga pada fungsi concentris. Misalnya pada kelemahan Quadriceps, maka kontrol terhadap flexi knee pada periode loading response akan terganggu.
Jari2 yang diseret (toe drag) pada mid swing adalah tanda2 dari adanya kelemahan atau kurang berfungsinya otot2 anterior ankle. Bila ada kelemahan flexor hip maka akan ada kesulitan atau deviasi pada saat mengayun tungkai kedepan. Stance stability akan terganggu bila otot2 lateral hip mengalami kelemahan, selanjutnya akan muncul pola jalan yang khas, dimana contralateral hip/pelvis akan drop, trunk bertumpu ditungkai sisi yang sama. Deviasi ini dikenal luas sebagai fenomena Trendelenburg, sebagai akibat dari kelemahan gluteus medius. Apabila gastrocnemius dan soleus lemah maka stabilisasi tibia selama periode singgle limb support akan terganggu. Nampak pada observasi terjadi dorsiflexi berlebihan sehingga tibia akan collapse selama periode midstance dan terminal stance. Sebagai akibat ketidakstabilan tibia maka momentum dan progression kedepan akan terganggu dengan manifestasi menurunnya step length dan velocity.
Deformitas.
Deformitas yang timbul sebagai komplikasi ketidak seimbangan kerja otot, peningkatan aktifitas otot, congenital deformity, amputasi akan menimbulkan disabilitas. Keterbatasan lingkup gerak sendi pasti akan menimbulkan deviasi pola jalan, karena factor atau gerakan yang seharusnya muncul tidak ada. Keterbatasan lingkup gerak sendi dikombinasi dengan kelemahan otot atau hilangnya kontrol akan sangat mempengaruhi pola jalan secara dramatis. Hilang atau berkurangnya mobilitas sendi adalah suatu hal yang penting yang harus diperhatikan, karena selain pengaruh langsung terhadap deviasi pola jalan, tetapi juga pengaruhnya terhadap peningkatan tekanan/kompresi kepada persendian sekitar. Persendian sekitar tsb akan melakukan kompensi dengan melakukan usaha yang memerlukan energy extra untuk mensubstitusi fungsi gerakan yang hilang / berkurang. Posisi berdiri normal membutuhkan hip dan knee dalam posisi full extensi, dorsiflexi ankle 5°- 10°. Dengan posisi ini maka center gravity akan relatif berada disebelah posterior axis hip joint dan disebelah anterior knee joint, sehingga untuk mempertahankan posisi ini relatif tidak diperlukan kerja otot baik di hip joint maupun di knee joint. Sebaliknya bila posisi ini tidak tercapai maka diperlukan kerja otot secara berlebih (extra energy) untuk mencapai balance. Posisi hip joint dan knee joint yang tertahan dalam posisi flexi akan meningkatkan tekanan/kompresi didalam persendiannya.
Bila posisi knee joint lebih dari 30°fungsi ambulasi akan sulit dipenuhi atau bahkan tidak bisa dipenuhi. Pasien dengan plantar flexi kontraktur 15°akan berjalan dengan jarinya, dimana pola ini adalah bukan pilihan yang benar. Pasien akan berupaya melakukan adaptasi kondisi tsb dengan berusaha untuk menapakan kakinya. Bila usaha menapak kaki berhasil maka akan mengakibatkan bergesernya berat tubuh kearah posterior kakinya, hal ini akan menimbulkan gangguan keseimbangan. Untuk menghindari jatuh kebelakang pasien akan berusaha mencondongkan / membungkukkan tubuhnya kedepan diatas kaki yang bertumpu. Selain itu juga akan muncul toe drag saat swing, untuk itu pasien berusaha membebaskan jari dari lantai dengan berusaha meninggikan / memanjangkan tungkai sisi contralateral dengan berjinjit untuk mencegah toe drag.
Sensory disturbance.
Impairment sense terhadap posisi sendi adalah factor yang mempengaruhi terhadap fungsi motor kontrol. Tanpa ada kesadaran mengenai posisi sendi dan relasinya dengan segment yang lain maka kontrol gerakan akan sangat tergantung pada input visual dan atau pemakaian alat2 bantu untuk mengerem gerakan atau menghentikannya. Walaupun
P3 FT di Fasilitas Pelayanan Kesehatan 8
demikian kedua hal tersebut masih tidak adequate sebagai kompensasi atas hilangya fungsi proprioceptif. Manifestasinya adalah timbulnya toe drag, gangguan stabilitas ankle baik arah medial maupun lateral selama periode stance; hip flexi berlebihan saat swing.
Disorder aktifitas kerja otot.
Hal ini bisa disebabkan oleh spinal cord injury, brain injury. Gerakan terbatas pada pola synergist baik posisi flexi maupun extensi, seperti nampak pada pasien hemiplegia. Kemampuan untuk bergerak secara terkoordinasi, reciprocal seperti hip flexi dan knee extensi terganggu atau hilang
Gangguan di central nervous system bisa terjadi sebagai akibat dari trauma saat dilahirkan, congenital, overdosis obat, dsb. Gejala yang muncul adalah dystonic. Reaksi yang berlebihan terhadap aksi otot / gerakan, misalnya stretching, reaksi inilah yang dikenal luas sebagai spastisitas. Brunstrom (1970) dan Bobath (1978) telah mempelajari secara lebih detail kaitanya dengan pola jalan.
Gangguan gerak pada kondisi cerebral palsy dengan berbagai syndroma, tergantung dari seberapa banyak otot yang terlibat. Cerebral palsy diplegic, misalnya, posisi berdirinya akan typical / khas. Meningkatnya aktifitas flexor ditungkai mambawa hip dalam posisi flexi demikian juga knee jointnya, denga berbagai variasi derajat ROM. Posisi flexi tadi berkombinasi dengan adductors yang spastis akan menimbulkan fenomena yang terkenal yaitu ‘Scissor Gait’
Bila aktifitas extensor meningkat, maka akan timbul kekakuan dan terjadi pergeseran penumpuan berat tubuh ke fore foot, varus di ankle, claw toes serta kesulitan untuk memulai gerak reciprocal flexi – extensi pada saat berjalan.
Pada Parkinson’s disease, dimana kekakuan sebagai problema besar, maka posisi tubuh akan flexi dengan pola jalan ‘gait suffling’. Stride length menurun, velocity menurun, periode double support bertambah lama. Pasien akan mengalami kesulitan untuk mulai bergerak / melangkah, dan begitu berhasil melangkah pasien akan kesulitan untuk mengkontrolnya / berhenti (Festination).









blognya bagus, sangat bermanfaat. apalagi kalau ditambah contoh-contoh abnormal gaitnya + analysis. terimakasih
BalasHapus